ES学习一:Lucene的索引结构
全文检索
所以在了解Lucene之前要费一番工夫了解一下全文检索。
那么什么叫做全文检索呢?这要从我们生活中的数据说起。
我们生活中的数据总体分为两种:结构化数据和 非结构化数据 。
- 结构化数据: 指具有固定格式或有限长度的数据,如数据库,元数据等。
- 非结构化数据: 指不定长或无固定格式的数据,如邮件,word文档等。
当然有的地方还会提到第三种,半结构化数据,如XML,HTML等,当根据需要可按结构化数据来处理,也可抽取出纯文本按非结构化数据来处理。
非结构化数据又一种叫法叫全文数据。
按照数据的分类,搜索也分为两种:
- 对结构化数据的搜索 :如对数据库的搜索,用SQL语句。再如对元数据的搜索,如利用windows搜索对文件名,类型,修改时间进行搜索等。
- 对非结构化数据的搜索 :如利用windows的搜索也可以搜索文件内容,Linux下的grep命令,再如用Google和百度可以搜索大量内容数据。
对非结构化数据也即对全文数据的搜索主要有两种方法:
- 顺序扫描法(Serial Scanning): 所谓顺序扫描,比如要找内容包含某一个字符串的文件,就是一个文档一个文档的看,对于每一个文档,从头看到尾,如果此文档包含此字符串,则此文档为我们要找的文件,接着看下一个文件,直到扫描完所有的文件。
- 全文检索(Full-text Search): 将非结构化数据中的一部分信息提取出来,重新组织,使其变得有一定结构,然后对此有一定结构的数据进行搜索,从而达到搜索相对较快的目的,这部分从非结构化数据中提取出的然后重新组织的信息,我们称之 索引 。

左边保存的是一系列字符串,称为 词典 。
每个字符串都指向包含此字符串的文档(Document)链表,此文档链表称为 倒排表 (Posting List)。
这部分对有基础的应该很快熟悉,所以不过多介绍
来看看Lucene是怎样存储索引文件格式
Lucene的文件扩展名摘要
首先,要像了解lucene是怎样存储的,可以看看存储文件:

Lucene的索引结构中,即保存了正向信息,也保存了反向信息。
所谓正向信息:
- 按层次保存了从索引,一直到词的包含关系:索引(Index) –> 段(segment) –> 文档(Document) –> 域(Field) –> 词(Term)(这些概念稍后会介绍)
- 也即此索引包含了哪些段,每个段包含了那些文档,每个文档包含了那些域,每个域包含了那些词。
- 既然是层次结构,则每个层次都保存了本层次的信息以及下一层次的元信息,也即属性信息。
- 如上图,包含正向信息的文件有:
- segments_N保存了此索引包含多少个段,每个段包含多少篇文档。
- .fnm保存了此段包含了多少个域,每个域的名称及索引方式。
- .fdx,.fdt保存了此段包含的所有文档,每篇文档包含了多少域,每个域保存了那些信息。
- .tvx,.tvd,.tvf保存了此段包含多少文档,每篇文档包含了多少域,每个域包含了多少词,每个词的字符串,位置等信息。
所谓反向信息:
- 保存了词典到倒排表的映射:词(Term) –> 文档(Document)
- 如上图,包含反向信息的文件有:
- .tis,.tii保存了词典(Term Dictionary),也即此段包含的所有的词按字典顺序的排序。
- .frq保存了倒排表,也即包含每个词的文档ID列表。
- .prx保存了倒排表中每个词在包含此词的文档中的位置。
索引文件结构
- 索引(index)
- Lucene的索引由许多个文件组成,这些文件放在同一个目录下
- 段(segment)
- 一个Lucene的索引由多个段组成,段与段之间是独立的。添加新的文档时可以生成新的段,达到阈值(段的个数,段中包含的文件数等)时,不同的段可以合并。
- 在文件夹下,具有相同前缀的文件属于同一个段
- segments.gen 和 segments_N(N表示一个具体数字,eg:segments_5)是段的元数据文件,他们保存了段的属性信息。
- 文档(document)
- 文档时建索引的基本单位,一个段中可以包含多篇文档
- 新添加的文档时单独保存在一个新生成的段中,随着段的合并,不同的文档会合并到至相同的段中。
- 域(Field)
- 一个文档有可由多个域(Field)组成,比如一篇新闻,有 标题,作者,正文等多个属性,这些属性可以看作是文档的域。
- 不同的域可以指定不同的索引方式,比如指定不同的分词方式,是否构建索引,是否存储等
- 词(Term)
- 词 是索引的最小单位,是经过词法分词和语言处理后的字符串
索引存储规则
了解完文件结构,再来了解一下 存储规则 :
Lucene为了使的信息的存储占用的 空间更小 ,访问 速度更快 ,采取了一些特殊的技巧
1,引入Term Index 层
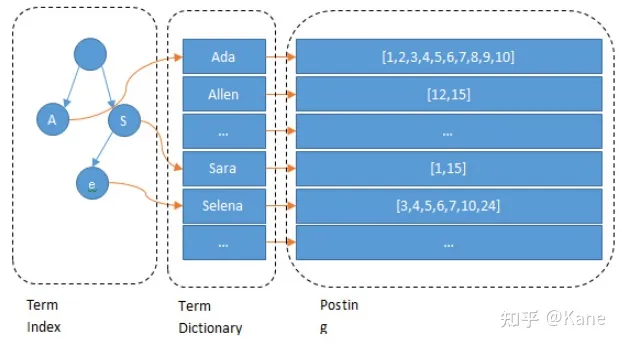
为了能快速找到某个term,将所有的term排个序, 二分法查找term ,logN的查找效率,就像通过字典查找一样,这就是 Term Dictionary( 这是第一步的加速)。现在再看起来,似乎和传统数据库通过B-Tree的方式类似啊,为什么说比B-Tree的查询快呢?
B-Tree通过减少磁盘寻道次数来提高查询性能,Lucene也是采用同样的思路,直接通过内存查找term,不读磁盘,但是如果term太多,term dictionary也会很大,放内存不现实,于是有了 Term Index( 这是第二步的加速),就像字典里的索引页一样,A开头的有哪些term,分别在哪页,可以理解term index是一颗树。
这棵树不会包含所有的term,它包含的是term的一些 前缀 。通过term index可以快速地定位到term dictionary的某个offset,然后从这个位置再往后顺序查找。如下图:
实际上存储:
比如要存储如下词:
term
termagancy
termagant
terminal
如果按照正常方式来存储,需要的空间如下:
[VInt = 4] [t][e][r][m]
[VInt = 10][t][e][r][m][a][g][a][n][c][y]
[VInt = 9][t][e][r][m][a][g][a][n][t]
[VInt = 8][t][e][r][m][i][n][a][l]
共需要35个Byte.
如果应用前缀后缀规则,需要的空间如下:
[VInt = 4] [t][e][r][m]
[VInt = 4 (offset)][VInt = 6][a][g][a][n][c][y]
[VInt = 8 (offset)][VInt = 1][t]
[VInt = 4(offset)][VInt = 4][i][n][a][l]
共需要22个Byte。
大大缩小了存储空间,尤其是在按字典顺序排序的情况下,前缀的重合率大大提高。
2, posting list的压缩
对posting list有压缩,有俩种压缩方式:
- 增量编码压缩(Frame Of Reference ) ,将大数变小数,按字节存储
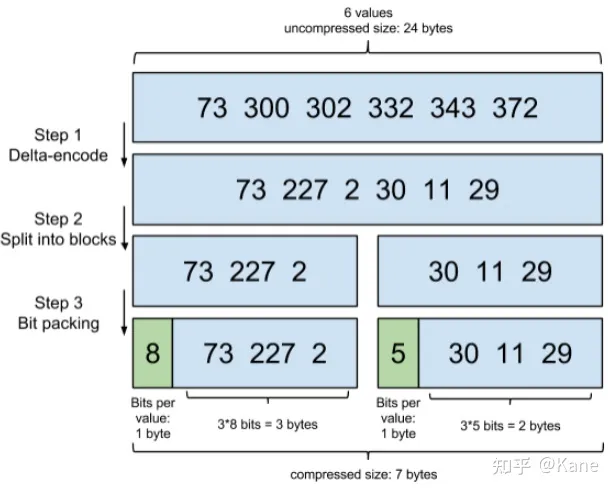
原理就是通过增量,将原来的大数变成小数仅存储增量值,再精打细算按bit排好队,最后通过字节存储,而不是大大咧咧的尽管是2也是用int(4个字节)来存储
比如要存储如下整数:
16386
16387
16388
16389
如果按照正常方式来存储,需要的空间如下:
[(1) 000, 0010][(1) 000, 0000][(0) 000, 0001]
[(1) 000, 0011][(1) 000, 0000][(0) 000, 0001]
[(1) 000, 0100][(1) 000, 0000][(0) 000, 0001]
[(1) 000, 0101][(1) 000, 0000][(0) 000, 0001]
供需12个Byte。
如果应用差值规则来存储,需要的空间如下:
[(1) 000, 0010][(1) 000, 0000][(0) 000, 0001]
[(0) 000, 0001]
[(0) 000, 0001]
[(0) 000, 0001]
共需6个Byte。
大大缩小了存储空间,而且无论是文档ID,还是词在文档中的位置,都是按从小到大的顺序,逐渐增大的。
- Roaring bitmaps
说到Roaring bitmaps,就必须先从bitmap说起。Bitmap是一种数据结构,假设有某个posting list:
[1,3,4,7,10]
对应的bitmap就是:
[1,0,1,1,0,0,1,0,0,1]
非常直观,用0/1表示某个值是否存在,比如10这个值就对应第10位,对应的bit值是1,这样用一个字节就可以代表8个文档id,旧版本(5.0之前)的Lucene就是用这样的方式来压缩的,但这样的压缩方式仍然不够高效,如果有1亿个文档,那么需要12.5MB的存储空间,这仅仅是对应一个索引字段(我们往往会有很多个索引字段)。于是有人想出了Roaring bitmaps这样更高效的数据结构。
Bitmap的缺点是存储空间随着文档个数线性增长,Roaring bitmaps需要打破这个魔咒就一定要用到某些指数特性:
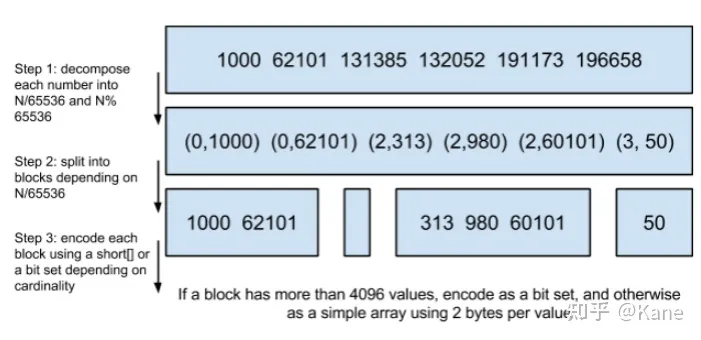
将posting list按照65535为界限分块,比如第一块所包含的文档id范围在0~65535之间,第二块的id范围是65536~131071,以此类推。再用 <商,余数> 的组合表示每一组id,这样每组里的id范围都在0~65535内了,剩下的就好办了,既然每组id不会变得无限大,那么我们就可以通过最有效的方式对这里的id存储。
细心的小明这时候又举手了:"为什么是以65535为界限?"
程序员的世界里除了1024外,65535也是一个经典值,因为它= 2^16-1 ,正好是用2个字节能表示的最大数,一个short的存储单位,注意到上图里的最后一行“If a block has more than 4096 values, encode as a bit set, and otherwise as a simple array using 2 bytes per value”,如果是大块,用节省点用bitset存,小块就豪爽点,2个字节我也不计较了,用一个short[]存着方便。
那为什么用4096来区分大块还是小块呢?
个人理解:都说程序员的世界是二进制的,4096*2bytes = 8192bytes < 1KB, 磁盘一次寻道可以顺序把一个小块的内容都读出来,再大一位就超过1KB了,需要两次读。
3,term index的压缩
Lucene使用FST算法以字节的方式来存储所有的Term,重复利用Term Index的前缀和后缀,使Term Index小到可以放进内存,减少存储空间,不过相对的也会占用更多的cpu资源。FST在Lucene4.0以后的版本中用于快速定位所查单词在字典中的位置。
Finite StateTransducers,简称 FST,通常中文译作 有穷状态转换器 ,在语音识别和自然语言搜索、处理等方向被广泛应用。
FST的功能类似于字典,可以表示成FST<Key, Value>的形式。其最大的特点是,可以用O(length(key))的复杂度来找到key对应的value,也就是说查找复杂度仅取决于所查找的key长度。
假设我们现在要将以下term index映射到term dictionary的block序号:
cat—— > 5
deep —— > 10
do —— > 15
dog —— > 2
dogs —— > 8
最简单的做法就是定义个Map<string, integer="">,大家找到自己的位置对应入座就好了,但从内存占用少的角度想想,有没有更优的办法呢?答案就是FST。
对于经典FST算法来说,要求Key必须按字典序从小到大加入到FST中。上面的例子中key已经排好序了。
按照以下步骤建立FST:
1.建一个空节点,表示FST的入口,所有的Key都从这个入口开始。
2.如果还有未处理的Key,则枚举Key的每一个label。处理流程如下:
2.1如果当前节点存在含此label的边,则
2.1.1如果Value包含该边的out值,则
Value = Value – out
2.1.2否则
令temp=out–Value;
out =Value,并使下一个节点的所有边out都加上temp。
如果下一节点是Final节点 则FinalOut += temp
2.1.3进入下一个节点
2.2否则: 新建一个节点另其out = Value, Value = 0。
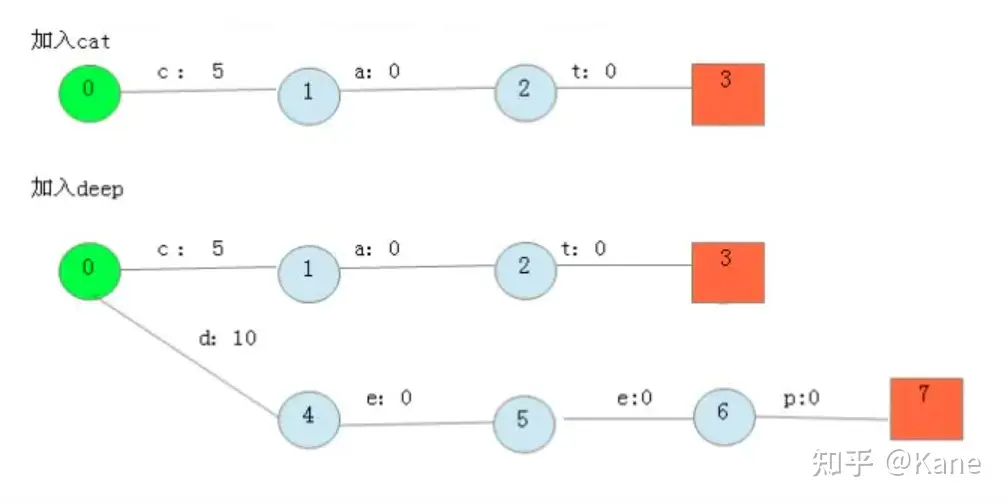


最后加入dogs,得到最后的结果:

从上图可以看出,每条边有两条属性,一个表示label(key的元素),另一个表示Value(out)。注意Value不一定是数字,还可一是另一个字符串,但要求Value必须满足叠加性,如这里的正整数2 + 8 = 10。字符串的叠加行为: aa + b = aab。
建完这个图之后,我们就可以很容易的查找出任意一个key的Value了。例如:查找dog,我们查找的路径为:0 → 4 → 8 → 9。 其权值和为: 2 + 0 + 0 + 0 = 2。其中最后一个零表示 node[9].finalOut = 0。所以“dog”的Value为2。
4,跳跃表规则(Skip list)
为了提高查找的性能,Lucene在很多地方采取的跳跃表的数据结构。
跳跃表(Skip List)是如图的一种数据结构,有以下几个基本特征:
- 元素是按顺序排列的,在Lucene中,或是按字典顺序排列,或是按从小到大顺序排列。
- 跳跃是有间隔的(Interval),也即每次跳跃的元素数,间隔是事先配置好的,如图跳跃表的间隔为3。
- 跳跃表是由层次的(level),每一层的每隔指定间隔的元素构成上一层,如图跳跃表共有2层。

需要注意一点的是,在很多数据结构或算法书中都会有跳跃表的描述,原理都是大致相同的,但是定义稍有差别:
- 对间隔(Interval)的定义 : 如图中,有的认为间隔为2,即两个上层元素之间的元素数,不包括两个上层元素;有的认为是3,即两个上层元素之间的差,包括后面上层元素,不包括前面的上层元素;有的认为是4,即除两个上层元素之间的元素外,既包括前面,也包括后面的上层元素。Lucene是采取的第二种定义。
- 对层次(Level)的定义 :如图中,有的认为应该包括原链表层,并从1开始计数,则总层次为3,为1,2,3层;有的认为应该包括原链表层,并从0计数,为0,1,2层;有的认为不应该包括原链表层,且从1开始计数,则为1,2层;有的认为不应该包括链表层,且从0开始计数,则为0,1层。Lucene采取的是最后一种定义。
跳跃表比顺序查找,大大提高了查找速度,如查找元素72,原来要访问2,3,7,12,23,37,39,44,50,72总共10个元素,应用跳跃表后,只要首先访问第1层的50,发现72大于50,而第1层无下一个节点,然后访问第2层的94,发现94大于72,然后访问原链表的72,找到元素,共需要访问3个元素即可。